DIY力回馈方向盘
本文最后更新于:2025年6月24日 下午
前言
以前用键盘玩欧洲卡车模拟2的时候,就一直想着能有个方向盘那该多美滋滋😀;有一天在B站刷视频时,无意中看到了UP主夏叶-XiaYe关于DIY力回馈方向盘的视频,顿时来了兴趣,打算自己动手制作一个,本篇文章主要用于记录制作过程以及改进优化,仅供学习。
设计图纸
结构设计
| 力回馈方向盘 V1.0 |
|
 |
|
|---|---|
| 设计思路 |
底板为5mm厚的环氧板;主轴使用轴承座固定于环氧板中间位置,左侧为开关电源(220V AC to 12V DC),右侧为旋转编码器、主控板、电机;旋转编码器和电机固定孔预留了左右移动空间,可用于拉紧同步带。 | 缺点 |
由于底板为环氧板,材料强度一般,导致拧上螺丝后,板子会发生弯曲变形,放置于桌面转动方向盘时会左右晃动;尺寸也显得 “肥胖” ,占用太多桌面空间。 |
| 力回馈方向盘 V2.0 |
|
 |
|
|---|---|
| 设计思路 |
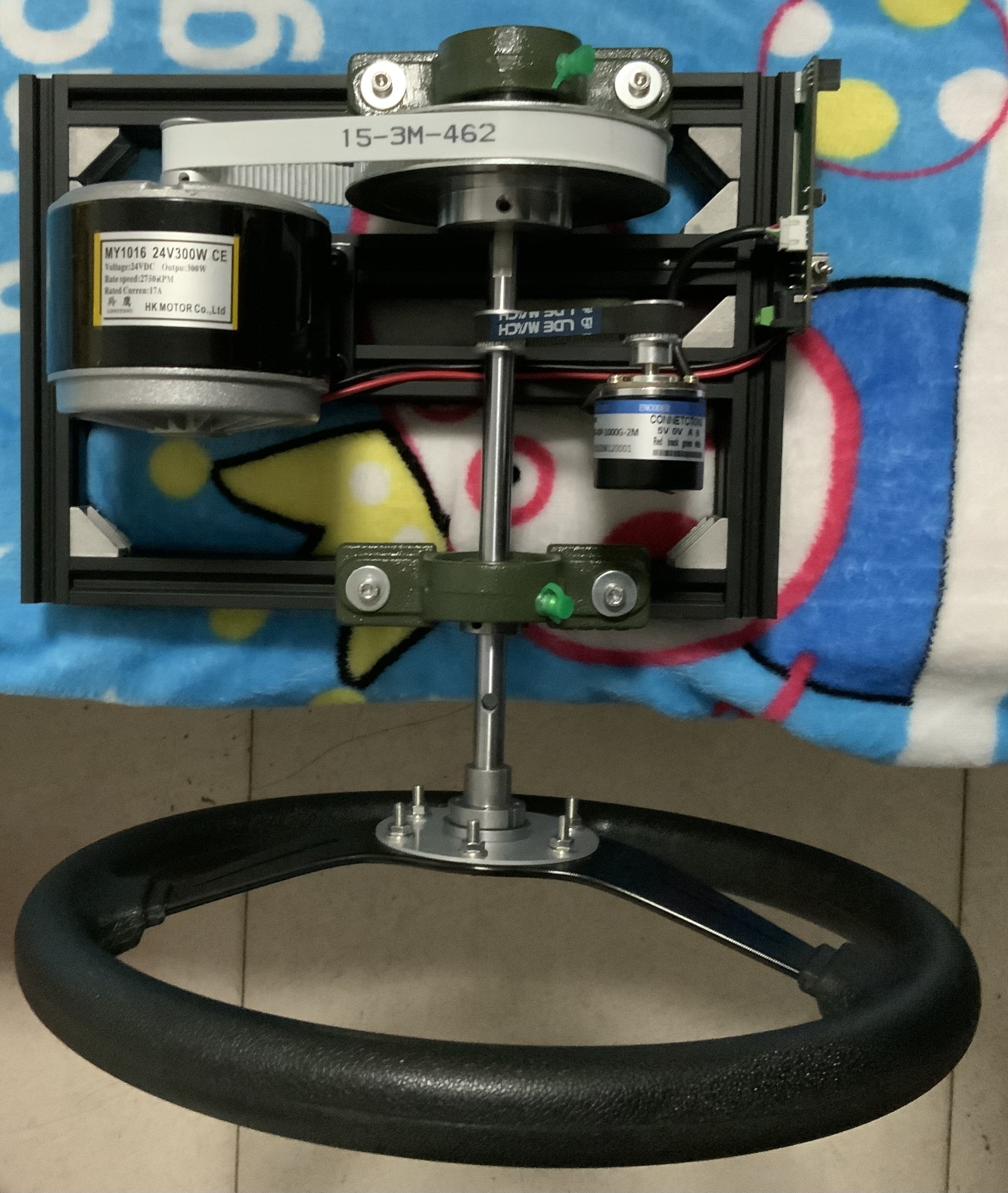
底板由环氧板更换为2040铝型材,强度可靠;电机固定于左侧,右侧为主轴与同步轮、旋转编码器;主控板固定于右侧型材靠上的表面,便于使用数据线与电脑进行连接;电源依然为开关电源,但固定方式选择外置,使用DC头连接到主控板上的电机控制板,缩小尺寸。 | 缺点 |
主轴为光轴,由于表面光滑,导致同步轮使用顶丝固定后会出现打滑情况;同步带宽度偏窄,方向盘转向手感较差;脚踏板与主控板使用XH2.54接口连接,多次拔插时容易松动。 |
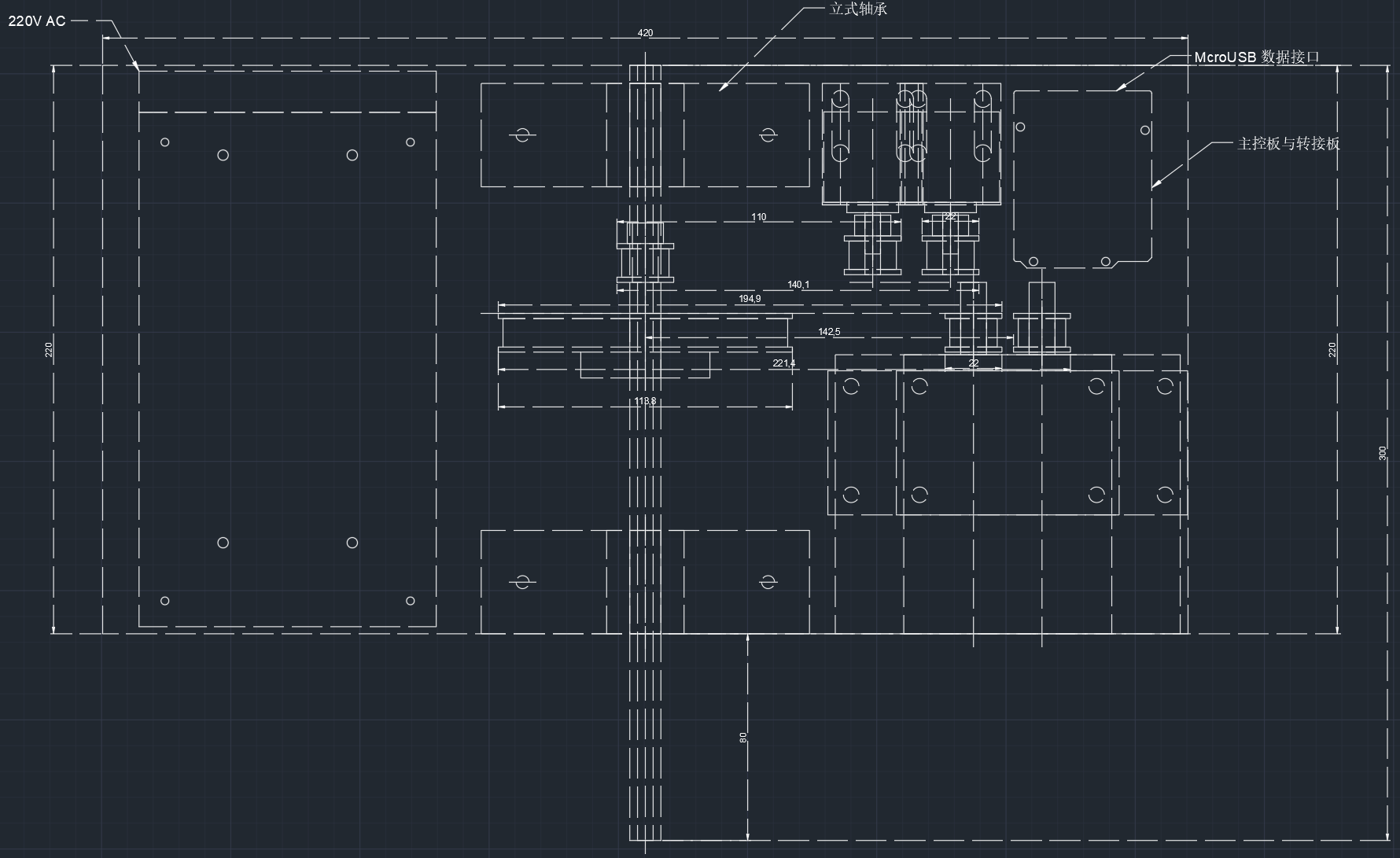
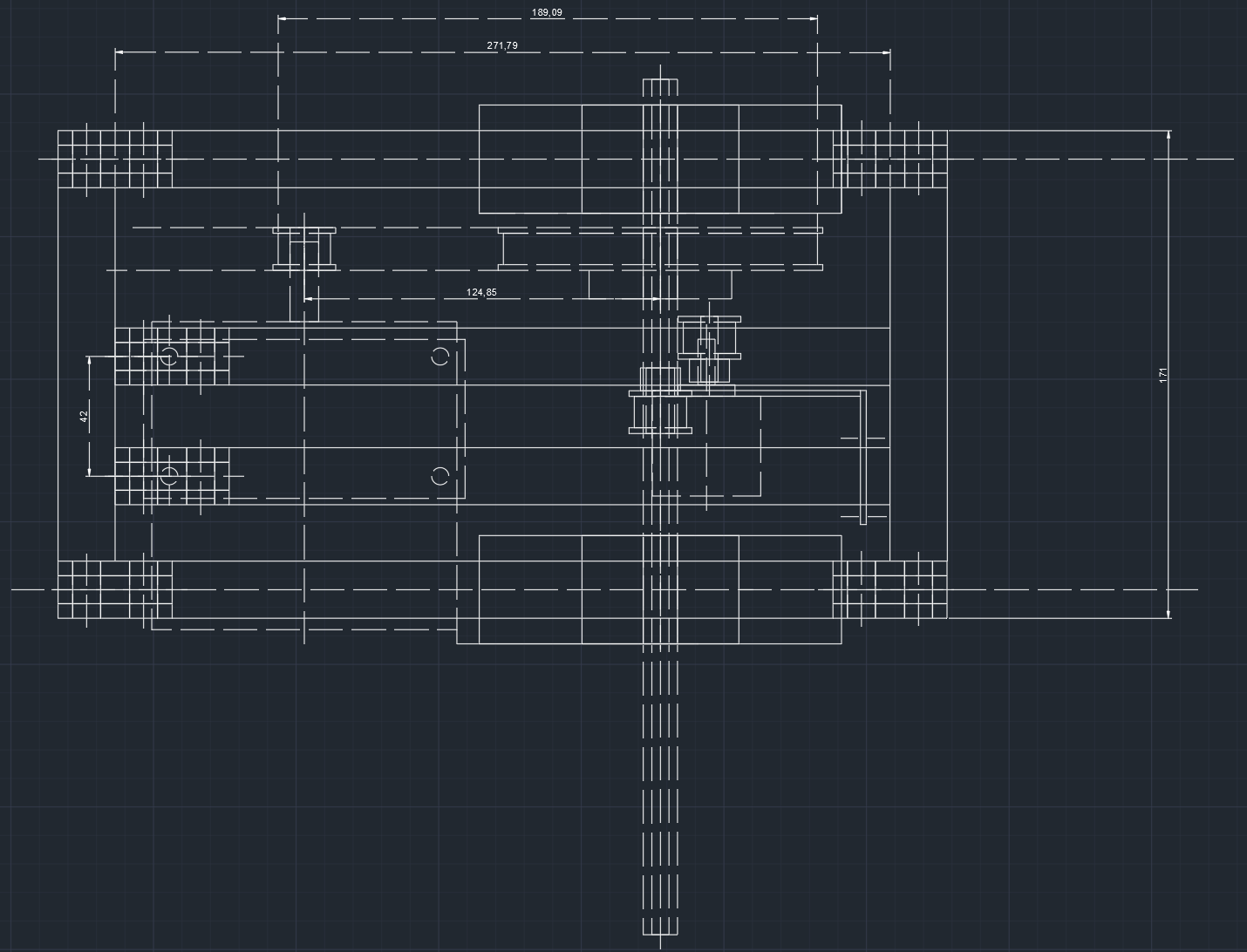
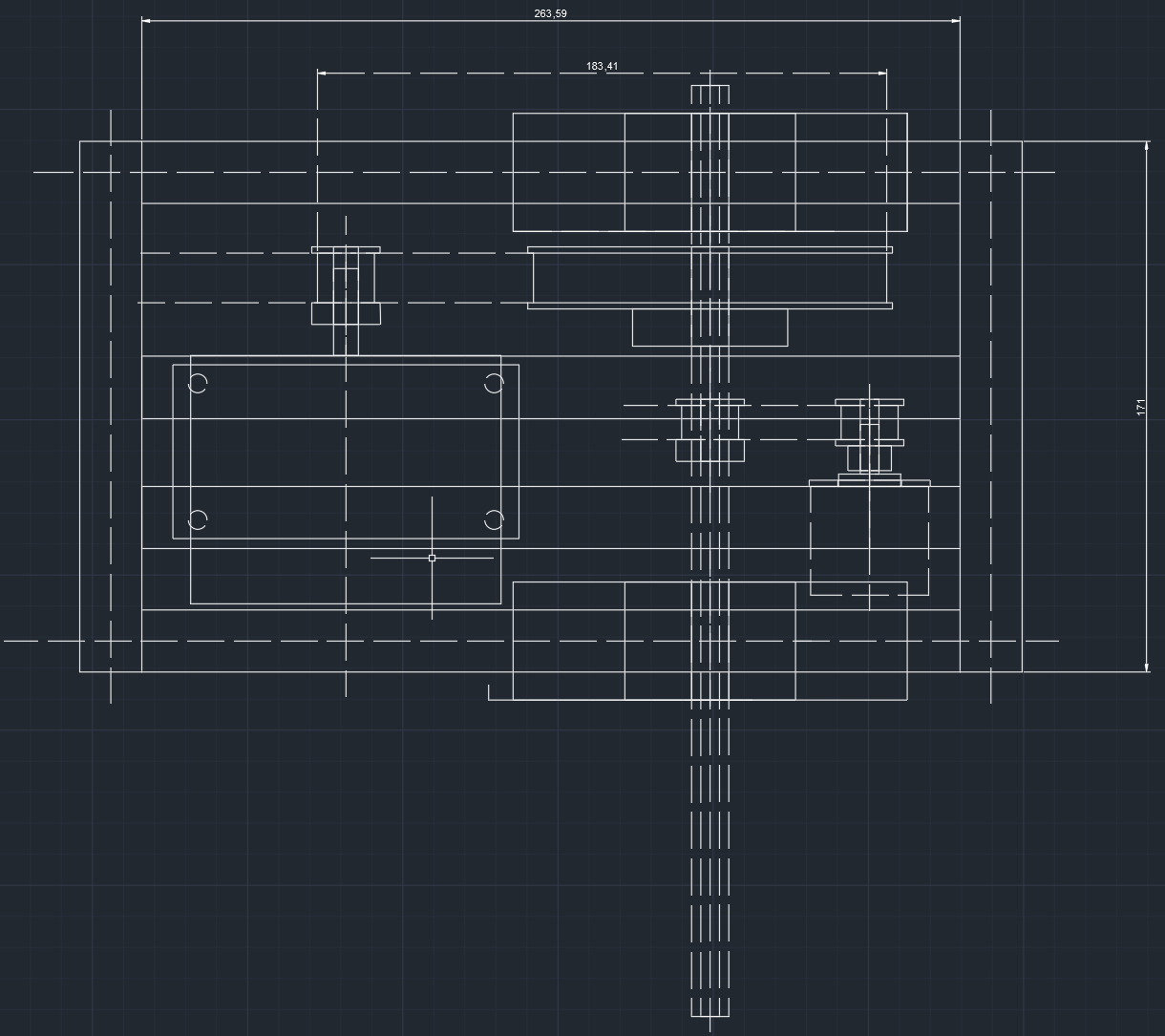
| 力回馈方向盘 V2.1 |
|
 |
|
|---|---|
| 设计思路 |
由 V2.0 升级优化而来,整体尺寸进一步缩小;将主控板进行了重新设计,解决 V2.0 “叠汉堡” 式的固定方式;电源未使用开关电源,外置开关电源还是显得太笨重,所以选择使用12V 5A笔记本电源,体积小了很多,还可以放在型材之间固定起来;对光轴进行了挖槽处理,解决顶丝打滑的情况。 | 缺点 |
暂未发现。 |
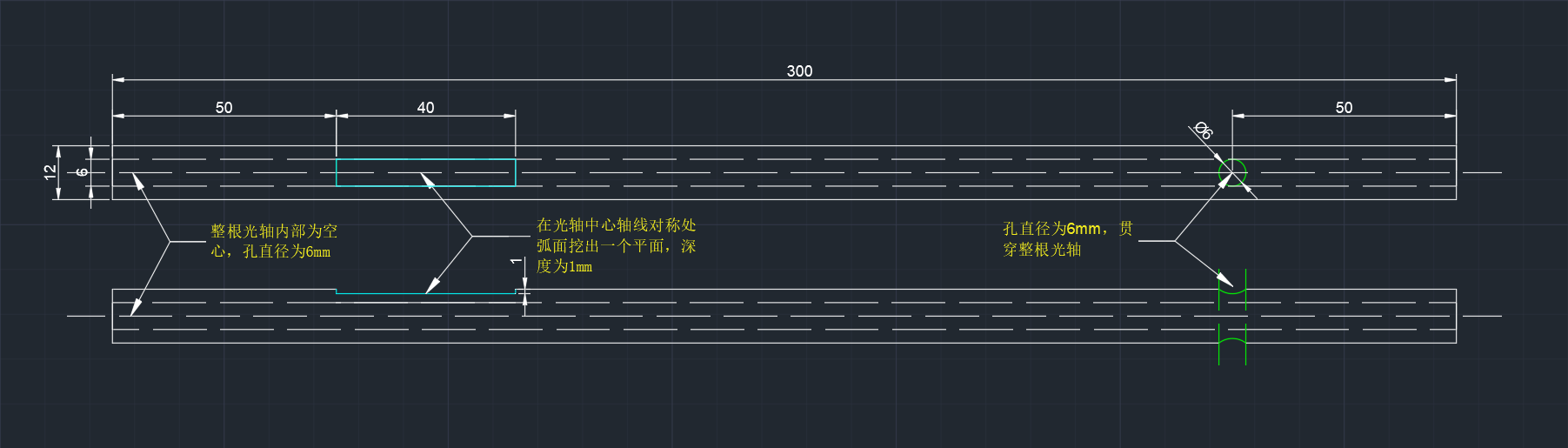
| 光轴加工图纸 V1.1 |
|
 |
|
|---|---|
| 设计思路 |
加入凹槽设计,解决同步轮使用顶丝固定后出现的打滑问题。 |
| 胀紧套转接板 V1.1 |
|
 |
|
|---|---|
| 设计思路 |
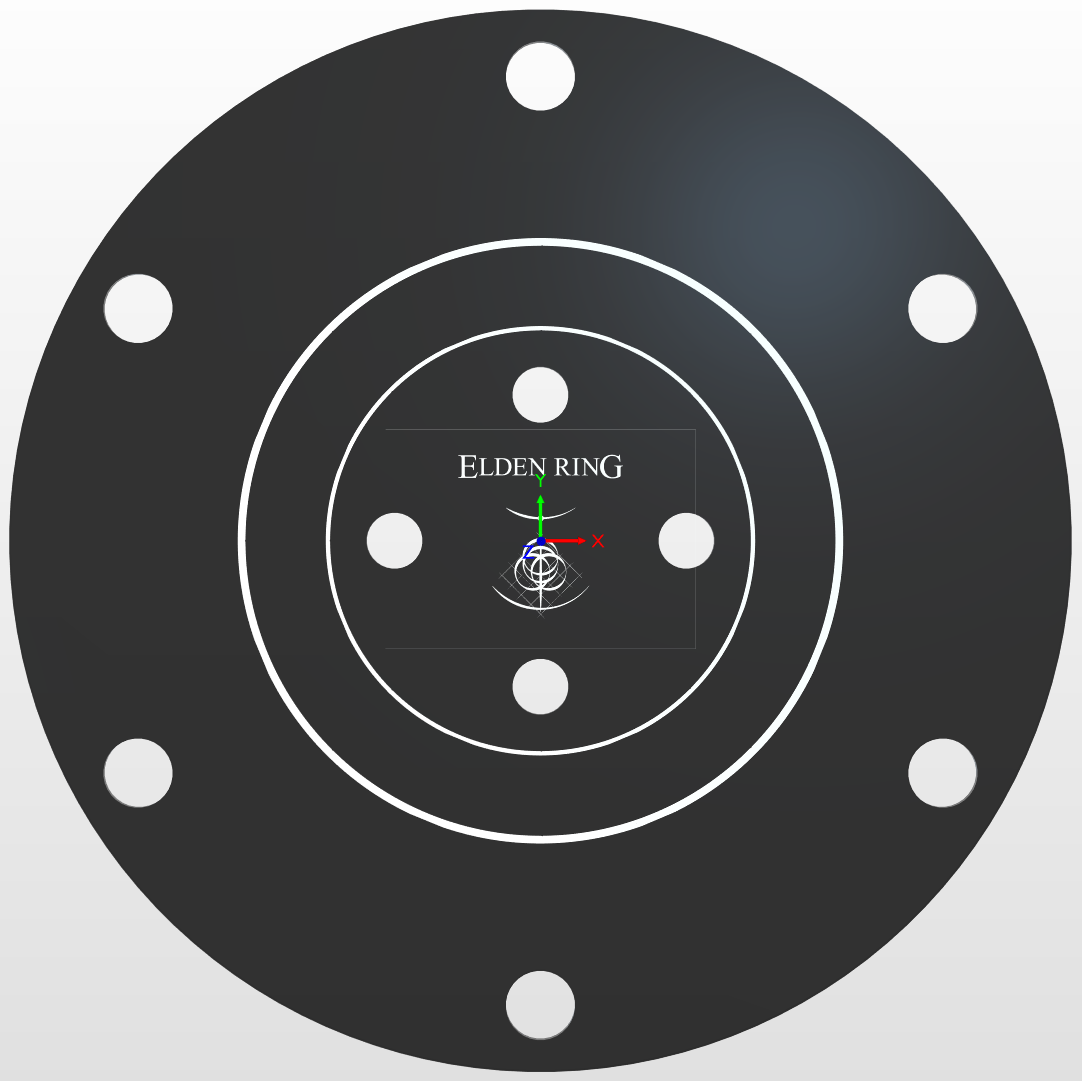
该转接板为铝基板,用于将方向盘与胀紧套紧固在一起。 |
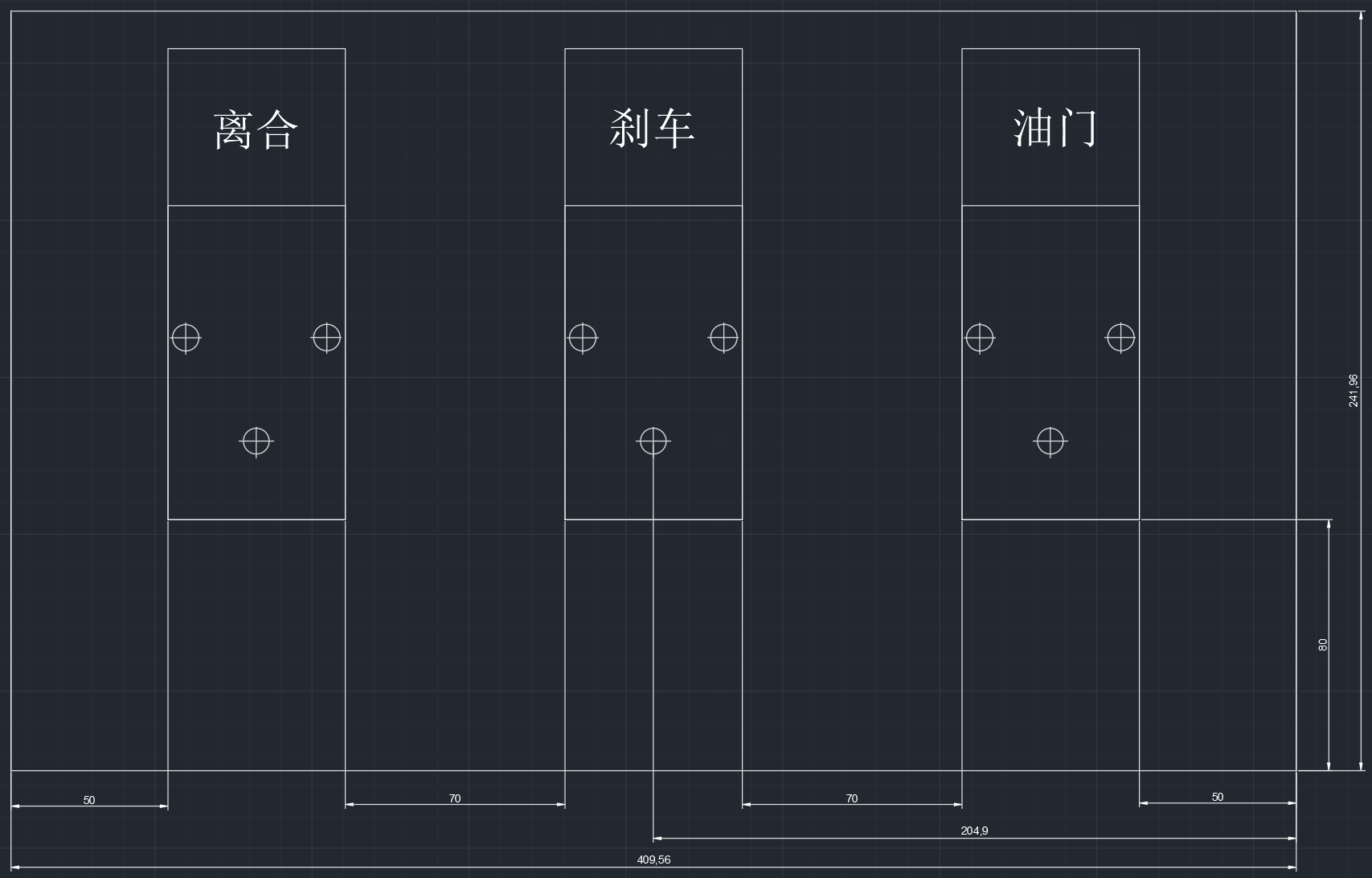
| 脚踏固定板钻孔尺寸图 V1.1 |
|
 |
|
|---|---|
| 设计思路 |
该尺寸图为木板钻孔尺寸图,用于固定脚踏板,使用自攻螺丝进行固定。 |
硬件设计
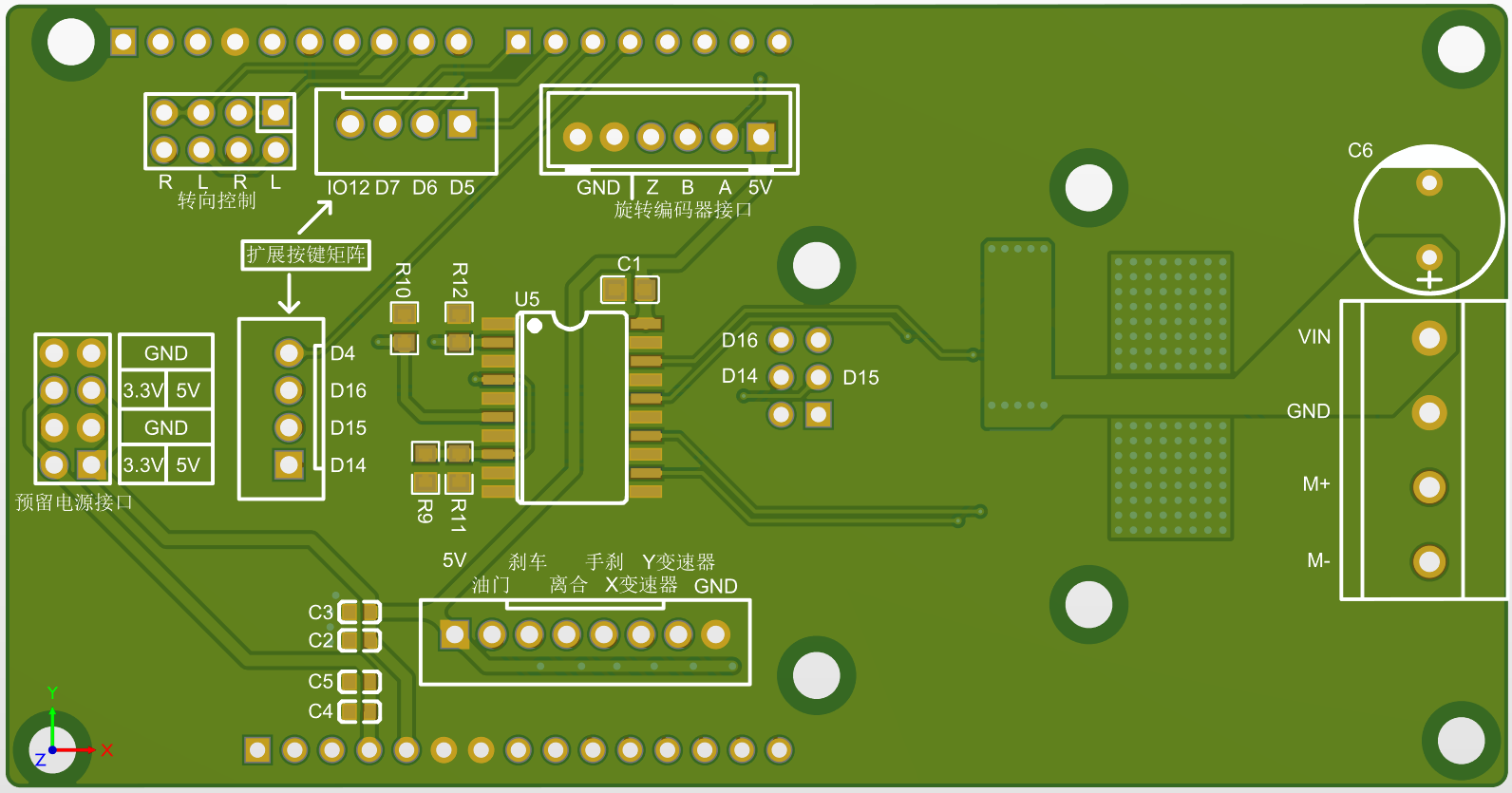
| 电机控制板 V2.0 |
|
 |
|
|---|---|
| 设计思路 |
主控板为Arduino Leonardo开发板;电机控制板使用排针上下对插的方式与主控板连接。 |
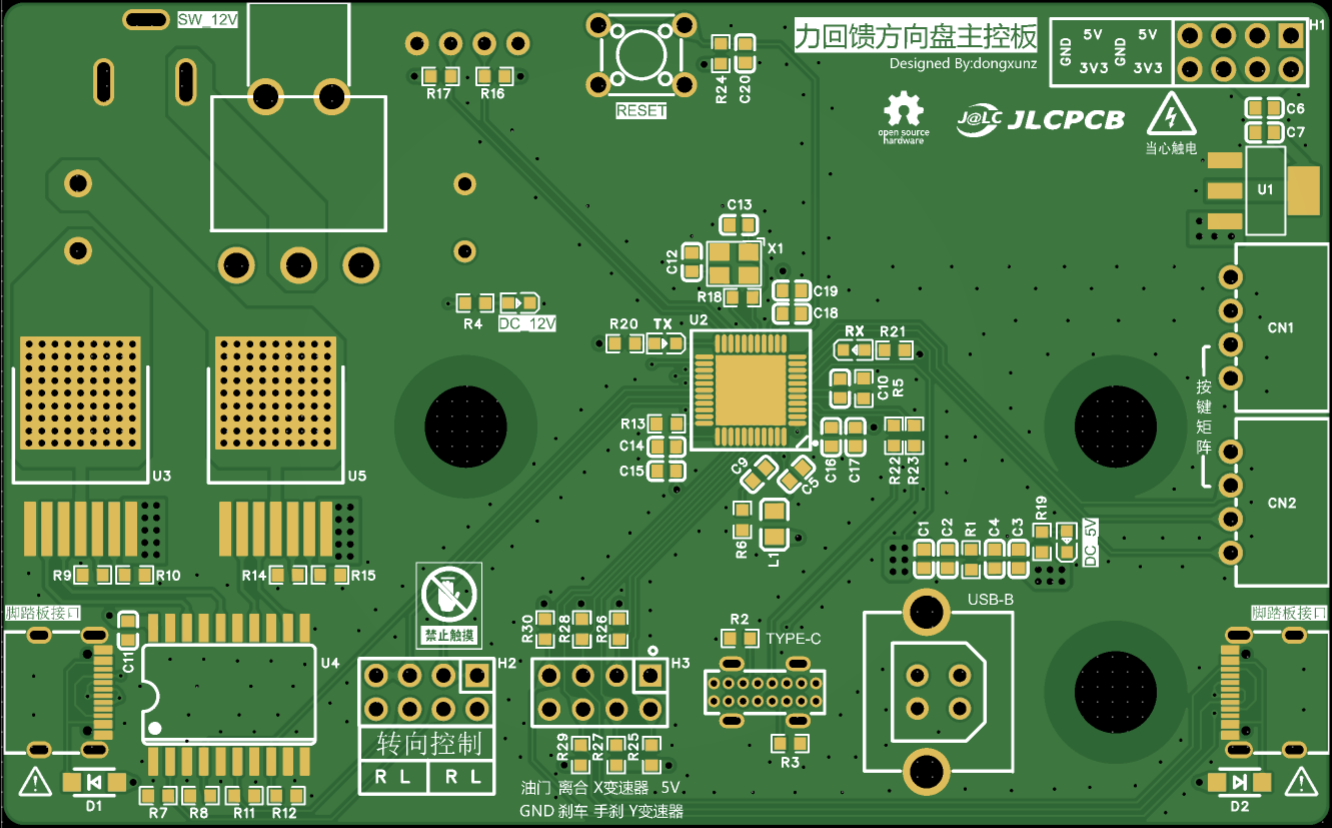
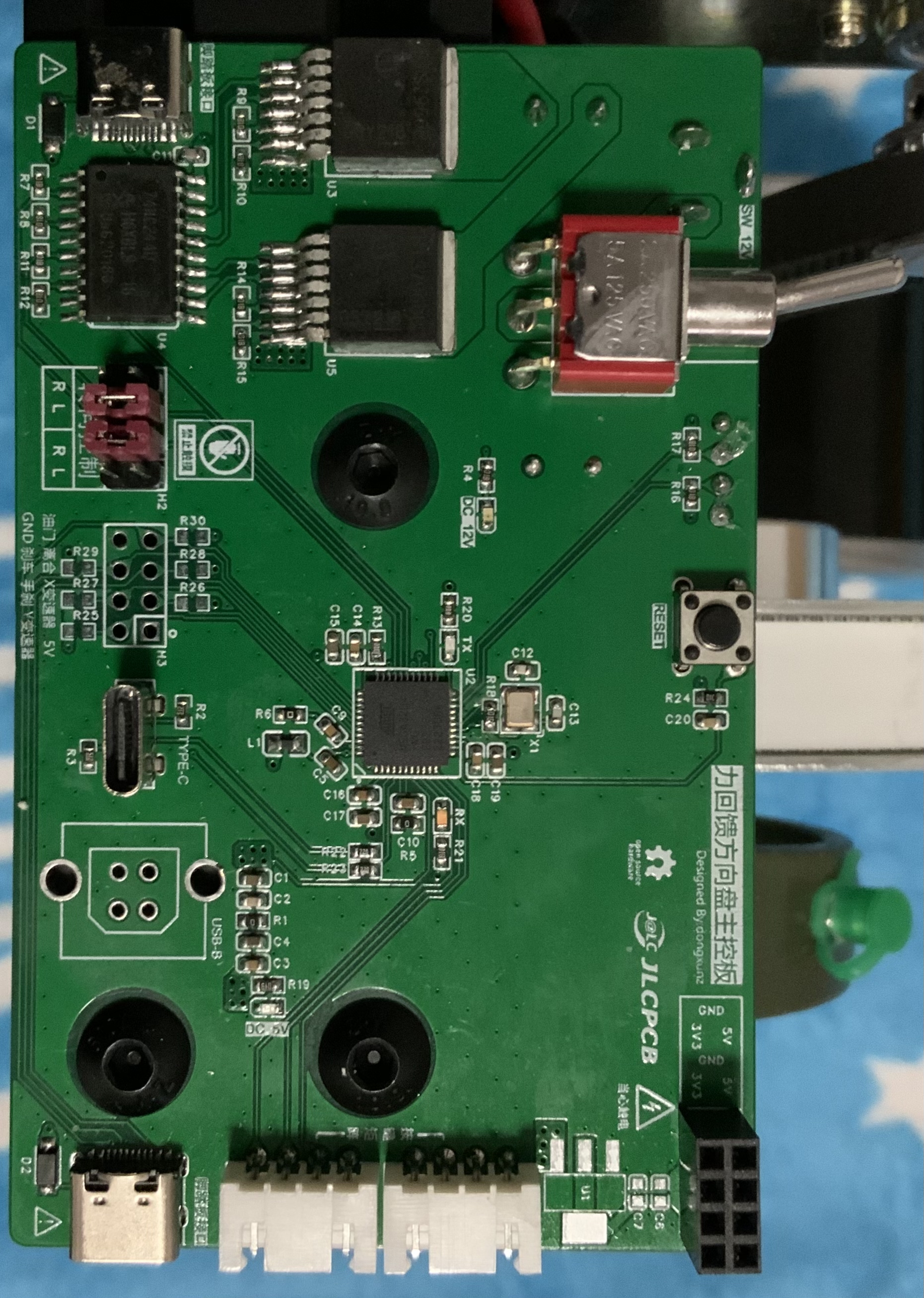
| 力回馈方向盘主控板 V2.1 |
|
 |
|
|---|---|
| 设计思路 |
主芯片与电机控制电路全部在一块PCB上,集成度进一步提高;同时优化了主控板与电脑、脚踏板连接方式,解决因反复插拔导致接口松动,提升连接稳定性。 |
材料清单
力回馈方向盘 V2.1-BOM
| 商品名称与链接 | 数量 | 备注 |
|---|---|---|
| 力回馈方向盘主控板 V2.1 | 1 | 暂未开源,如需工程文件,请联系我👨🏻🔧 |
| 2040V型材 | 4+2 | 264mm *4 211mm *2 |
| MY1016电机 | 1 | 24V 300W |
| 旋转编码器 | 1 | 脉冲:1000 输出方式:NPN 供电:5V |
| 旋转编码器支架 | 1 | 直板 |
| 同步轮 3M120齿 BF型 | 1 | 光轴使用,槽宽16mm,内孔直径12mm |
| 同步轮 3M20齿 K型 | 1 | 电机使用,槽宽16mm,内孔直径8mm |
| 同步轮 3M20齿 K型 | 1 | 光轴使用,槽宽11mm,内孔直径12mm |
| 同步轮 3M20齿 BF型 | 1 | 旋转编码器使用,槽宽11mm,内孔直径6mm |
| 3M白色聚氨酯PU带钢丝环形接驳同步带 | 1 | 电机 <—> 光轴使用,带宽15mm,长度462mm |
| 橡胶同步带 | 1 | 旋转编码器 <—> 光轴使用,带宽10mm,长度180mm |
| 直线光轴 | 1 | 按照光轴加工图进行加工 |
| 立式带座外球面轴承座 | 2 | 内径12mm |
| 涨紧套 | 1 | Z11-12X18,将光轴与方向盘连接固定起来 |
| 14寸方向盘 | 1 | 颜色自选 |
| 脚踏板 | 3 | 插头类型无要求;如果不需要 离合,可以只买2个 |
| 电源适配器 | 1 | 12V 5A,输出接口:DC 5.5*2.5mm |
| 脚踏固定木板 | 1 | 长:40CM,宽:25CM,厚度:2CM;用于固定脚踏板 |
| 防滑垫 | 1 | 长:40CM,宽:25CM,厚度:3MM,用于粘贴在脚踏固定板底部,增加摩擦力 |
| 自攻螺丝 | 10 | M6*12 |
| C型夹 | 2 | 紫罗兰[梅花开口67(侧孔M10)],将方向盘固定在桌面上 |
成品示意图
力回馈方向盘 V2.1
下载程序
(待补充…)
配置参数
软件设置
- 将主控板 V2.1 使用数据线连接电脑,等待主控板上的 TX 灯亮起。
- 打开 EMC Utility Lite 软件。
- 点击右上角 齿轮 图标。
- Encoder — Cpr :旋转编码器脉冲 * 4。
- Hbridge — 2PWM + 1DIR。
- 点击 Save。
功能测试
转向测试
- 将主控板 V2.1 使用数据线连接上电脑,等待主控板上的 TX 灯亮起。
- 打开 EMC Utility Lite 软件。
- 将 Angle 使用鼠标拖到 900°。
- 将方向盘转到适当位置,鼠标点击 Center。
- 左转方向盘时,为负度数,右转方向盘时,为正度数。
第5步如果往左转方向盘为正度数,往右为负度数,需要将旋转编码器的 A/B 信号线互换。
力回馈测试
⚠此测试存在风险,请确保做好一切应急措施(保持安全距离,不要用手紧握方向盘,电机电源可立即关断,或者让其他人协助测试等等),此测试导致的任何后果本人概不负责,请小心谨慎!!!
- 将主控板 V2.1 使用数据线连接上电脑,等待主控板上的 TX 灯亮起。
- 将 220V 转 12V 5A 电源适配器插入主板DC母座,波动钮子开关(SW_12V),当主板上的 DC_12V 灯亮起即可。
- 打开 EMC Utility Lite 软件。
- 将 Angle 使用鼠标拖到 900°。
- 将方向盘转到适当位置,鼠标点击 Center。
- 一直往左打方向盘,直到度数为 -450° 时,此时电机会给一个反方向的力,阻止度数继续减小;然后一直往右打方向盘,直到度数为 450° 时,此时电机也会给一个反方向的力,阻止度数继续增大,即代表力回馈正常。
- 步骤1,3不能反着来,否则力回馈测试会没有反应(软件打开时会读取主控板参数,反着来会读不到参数,导致力回馈功能失效)。
- 当方向盘转到 -450° 或者 450° 时,电机突然转个不停或者转一下卡一下,需要立即断掉电源适配器的供电,并将数据线与电脑拔掉,将主板上 转向控制 的短接帽进行调换,然后重复上述步骤进行测试,直到力回馈正常。
脚踏板测试
- 将 脚踏板 通过Type-C线插在主板 脚踏板接口 上。
- 将主控板 V2.1 使用数据线连接上电脑,等待主控板上的 TX 灯亮起。
- 打开 EMC Utility Lite 软件。
- 点击 Pedal。
- 取消勾选 HandBrake ;如果不需要离合功能,需取消勾选 Clutch。
- 用脚踩踏 油门踏板 ,当 Accel 进度条随着脚越用力踩,进度条越高时,说明 油门踏板 配置正确。
- 用脚踩踏 刹车踏板 ,当 Brake 进度条随着脚越用力踩,进度条越高时,说明 刹车踏板 配置正确。
如果步骤6,7测试情况与之结果相反,需要点击对应功能的 Min 或者 Max,然后重复测试,直到结果一致,代表脚踏板功能正常。
特别鸣谢
DIY力回馈方向盘
https://dongxunz.github.io/2022/12/25/DIY/DIY力回馈方向盘/